This page contains a small selection of EEE student projects, with links to videos showing their work.
|
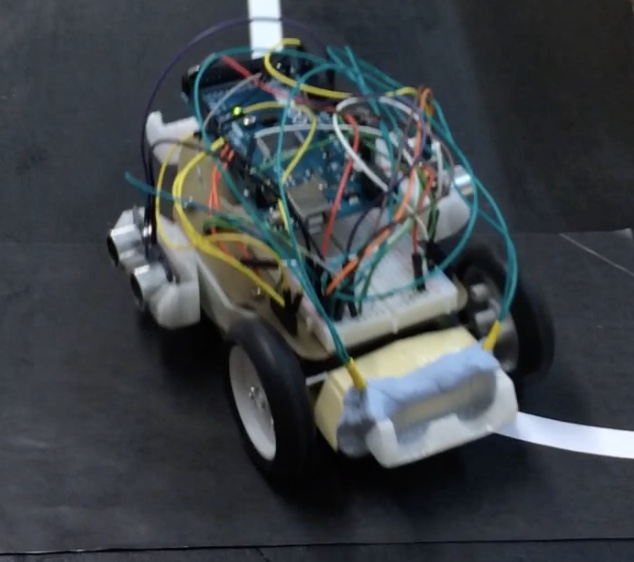
Students explore hardware and software design in Level 3 EE3579 Electronics Design. Starting with familar hardware, each team of two or three students design software for a microcontroller-based vehicle. Motors use
ultrasound sensors to
detect obstacles and steer away. These videos demo the results from two student groups.
QuickTime Video (Mac)
MP4 Video
|
 |
|
The EE3580 Digital Systems develops understanding of digital design, with practical solutions for real-world problems. The syllabus includes digital systems, hardware implementation, finite state machines with application to digital communications and robotics.
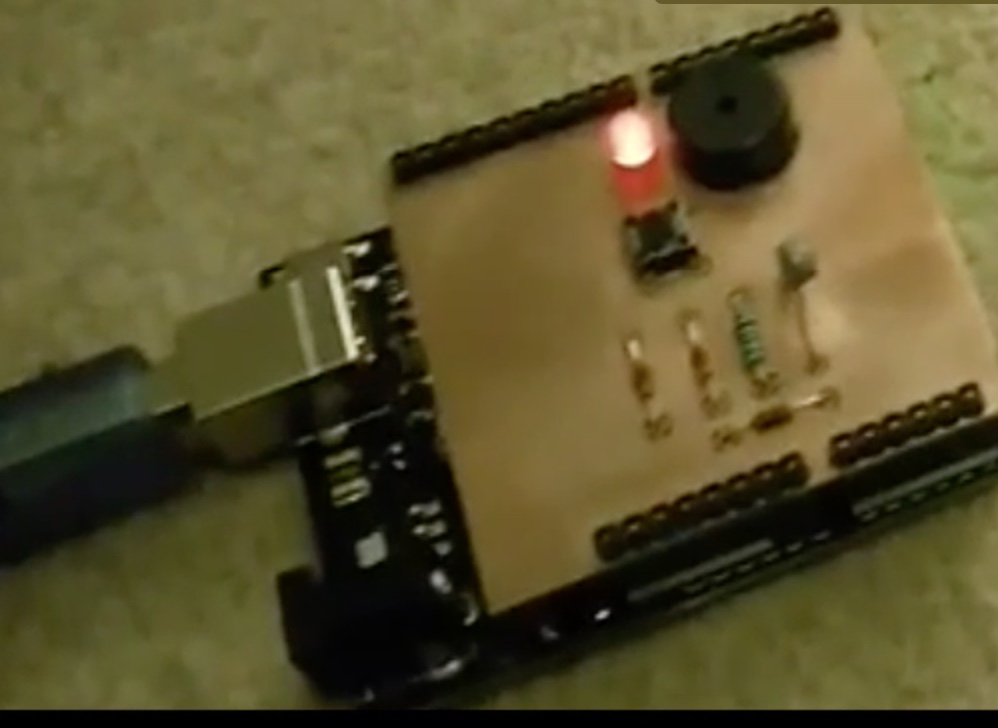
Students work with software and hardware to realise a design that is manufactured using the School's rapid printed circuit board prototyping facility This video shows a design for a thermal sensor to measure the temperature. When cooled by a fan it reaches a configured thershold, triggering an audible alarm.
QuickTime Video (.mov Mac)
|
 |
|
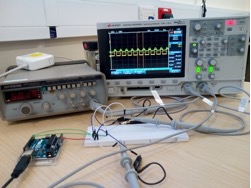
EE3576 teaches digital communications engineering with a focus on remote control of equipment using industry communication busses, including the use of GPS/NMEA (to identify location and time), Digital Multiplex (DMX) and the Controller Area Network (CAN) used in industrial control applications.
Teaching and tutorials are supported by demonstrations with actual equipment and a set of practical laboratory exercises.
MP4 Video
|
 |
|
Level 5 (MEng) activities design robots to meet various challenges. In this video teams of students compete to build robots that can navigate a maze.
MP4 Video
|
 |
All students complete an individual honours project, currently in the final half of their 4th year. Each student designs, specifys and performs tests to realise a system. Students can choose practical projects, theoretical analyis, or practical engineering design. The available projects cover a range of topics change year-by-year – often related to the teaching activities or research of the staff who supervise them, or a project linked to an industrial use-case. Many EEE students see their design through to evaluation of the finished system.
The following examples are a few from a very wide range of projects completed by EEE students spanning many years.
Communications and Control |
|
A Level 4 project to design a prototype controller for the DMX lighting and stage control protocol used in theatres and for live entertainment.
This project was one our first designs using an AVR microcontroller and designed the receiver board. This design has since been used for equipment at public events.
QuickTime Video (Mac)
MP4 Video
|
 |
|
Adam Elphinstone developed a LED matrix display that was interfaced to a control surface mapping video to the pixels. One challenge was to define a colour palette to compress the pixel information). The completed matrix is used as a teaching demonstration and is sometimes displayed at University Open days.
QuickTime Video
|
 |
|
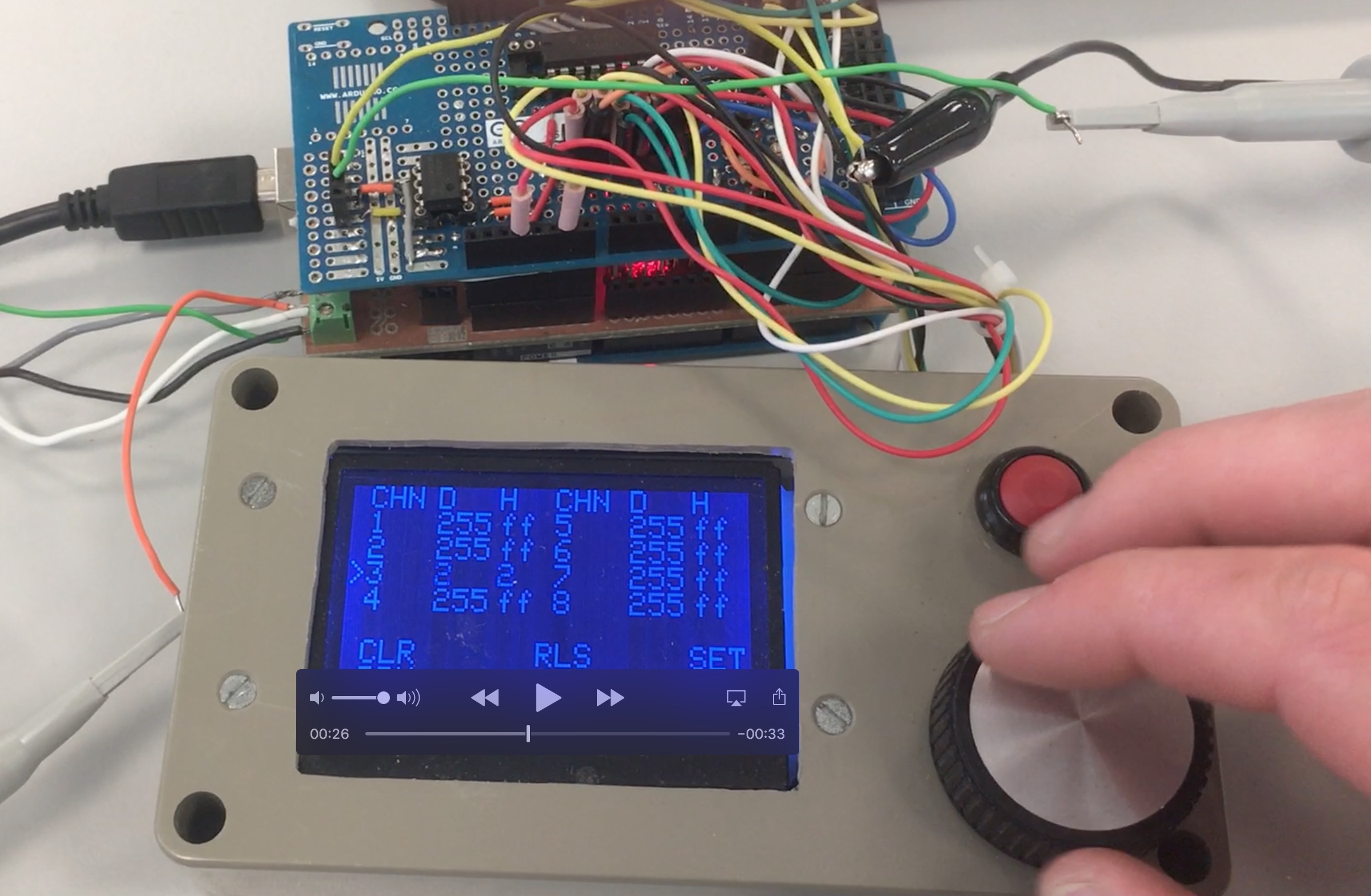
Pavel Dobrev completed a design for a DMX-based power distribution controller for 8 high current circuits using a 32A three phase supply. He developed electronics boards with a front panel to monitor the power distribution system. A remote control bus allowed temperature monitoring and control of the power circuits.
Quicktime Video (Mac)
MP4 Video
|
 |
|
William Duthie developed a rotational controller for an image projected by a gobo in lighting fixture. This used Designspark and maufactured boards using the PCB milling machine. The system used Arduino Mega 2560 hardware and a H-bridge motor driver. Analysis confirmed a linear relationship between the voltage and either motor RPM or indexed angular rotation. An additional unit was produced for use by the University.
MP4 Video
|
 |
|
Kieran Mackay designed a tester for the DMX control bus. He built hardware and software, and then designed printed circuit boards for the prototype manufactured using the School of Engineering rapid prototyping PCB milling machine.
MP4 Video
|
 |
Video Camera Control |
|
This project designed and built our first interface to an interface to a remote-controlled video camera. The student designed hardware and software to receive and process a DMX control signal and remotely operate a pan-tilt-zoom camera camera using the Sony VISCA interface. A working prototype was used to support video-streaming research.
QuickTime Video (Mac)
|
 |
|
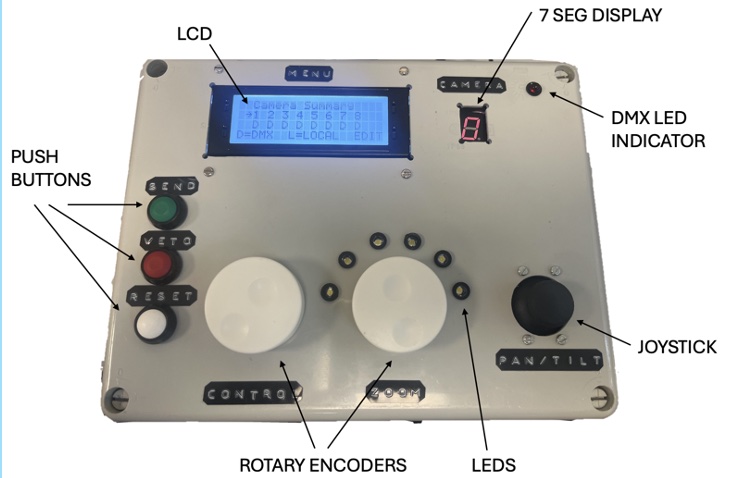
A 2024 project explored the latest VISCA protocol used to build a camera controller for High Definition broadcast TV cameras. The project designed software for a control surface and gateway that allows a user to point a camera, zoom, focus, and manipulate the TV image. The final design uses LCD displays and encoders to successfully control multiple cameras.
MP4 Video
|
 |
|
Scott McDougal designed the object-tracking algorithm being tested in the video. A PC with a camera mounted on a servo motor executes a tracking algorithm to identify a target (a yellow tennis ball) in the camera field of view (shown on the monitor). The algorithm recognized the traget position and communicates with an Arduino microcontroller that uses a servo motor to maintain the target at the centre of the video frame.
QuickTime Video (Mac)
MP4 Video
|
 |
Sensors and Sensing |
A project designed and built a remote-controlled battery vehicle.
Software developed by students ran on a microcontroller at the front of the vehicle to control the steering. A second controller at the rear controls the drive power. The video shows the first test of the complete prototype, which was later developed and used in teaching.
MP4 Video
|
 |
|
Angel Iliev designed a camera-based navigation algorithm for a Raspberry-Pi microcomputer connected to a
camera. This recognised the position and direction of travel of a small car, steeing it to stay within the limits of a target area (bounded by black lines). When the car approaches the bounds, the system wirelessly communicates with the car's microcontroller to stop and turn in a specific direction, before resuming driving straight.
QuickTime Video (Mac)
MP4 Video
|
 |
|
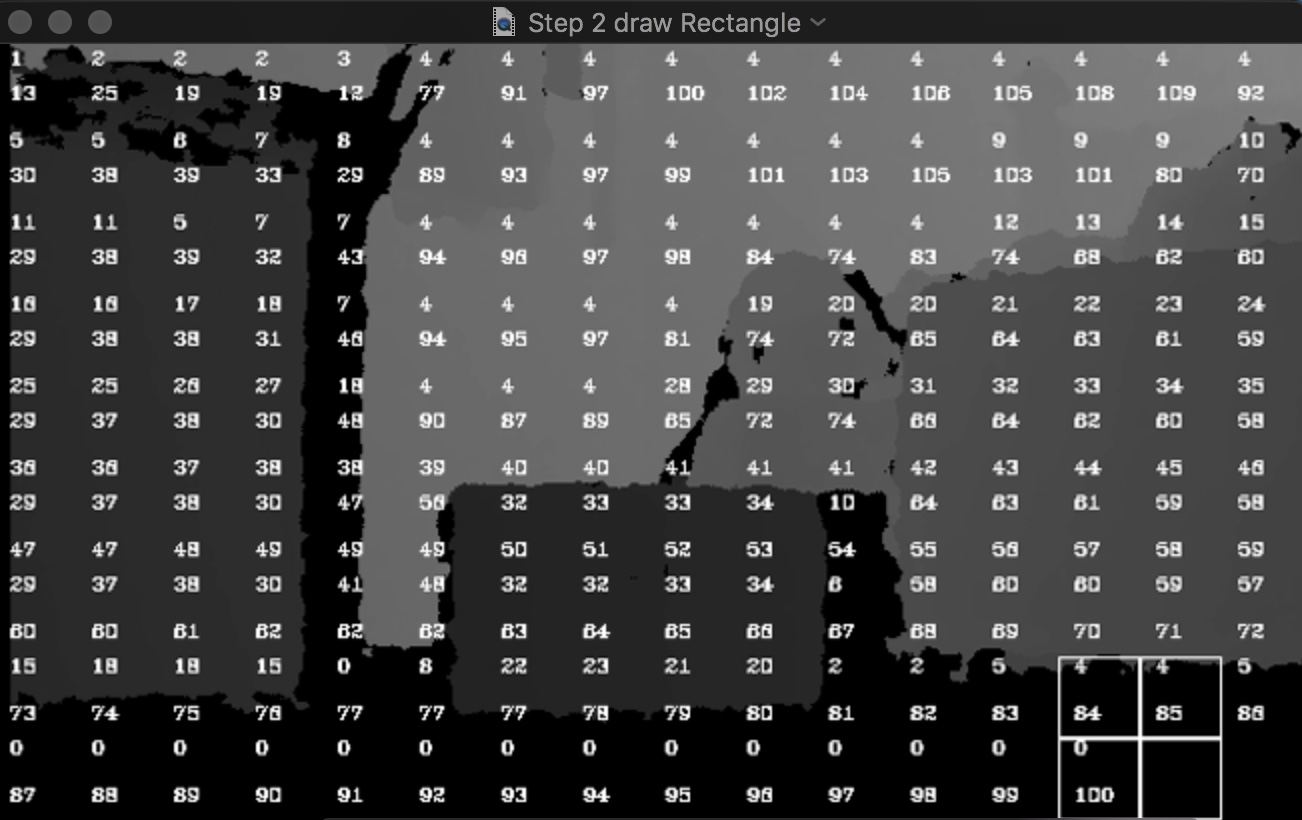
This level 4 project investigated hardware and software aspects of three-dimensional mapping using the Kinect IR camera.
An algorithm retrieved camera sensor readings, and displayed them using the OpenNI2 and OpenCV open-source libraries. Each scene is segmentated by scanning the depth image to split the captured scene into separate objects based on their location within the environment.
MP4 Video
|
 |
Robotics and Internet of Things |
|
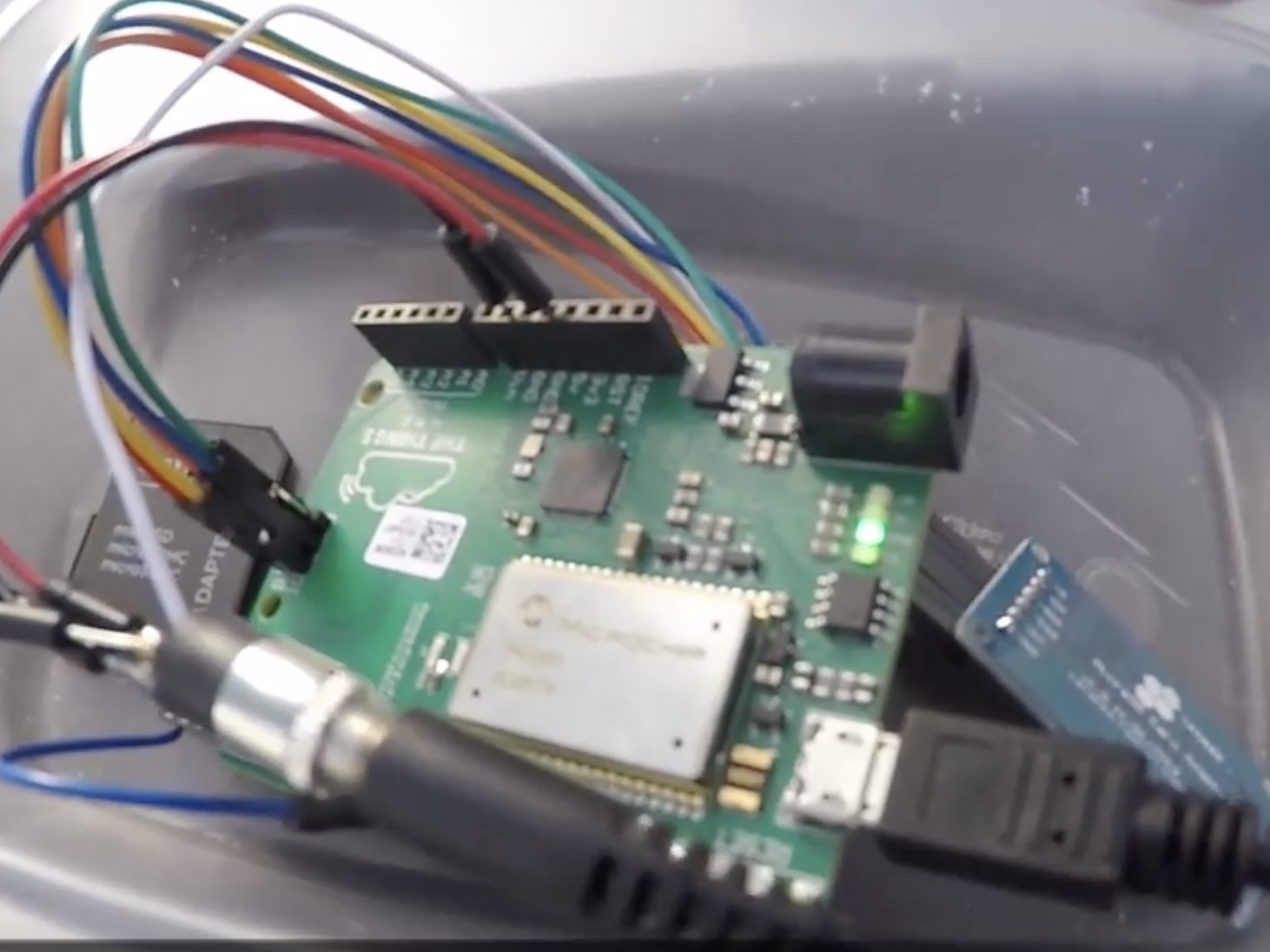
LoRaWAN is a low power radio communication protocol used for the Internet of Things (IoT).
This MEng project provided environmental telemetry, designing prototypes that integrated a GPS receiver to track the sensor's location. The video records a morning test trip to log the radio coverage provided by the University of Aberdeen campus IoT network.
MP4 Video
|
 |
|
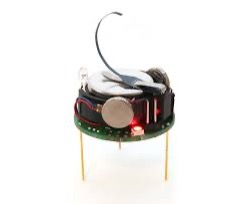
This project used a selection of kilobots,
a small mobile robot originaly developed at Harvard University. The
video shows 5 kilobots filmed from above. Each robot communicates to self-organise a behaviour, in this case exploring swarm behaviour by mimicking the way ants search for food.
MP4 Video
|
 |
Updated 2024.